Mechanism design
May 3, 2016 12:48 PM Subscribe
A simple mechanism made of two identical gears can be used to reverse the direction of rotation without changing the speed of rotation. Is there a simple planar linkage (e.g. 5-bar or 6-bar) with only rotary joints and rigid links that can do the same thing?
To describe it another way, I am looking for a planar linkage with a single degree of freedom where two of the links are rotating in opposite directions at exactly (or almost exactly) the same rate. The rotation does not have to be continuous, but the mechanism should work over a sufficiently large range of motion (e.g. 60-90 degrees of rotation). Again, the linkage can have rotary joints and rigid links only.
Special request: Please do not post links to large online collections of mechanisms in the hope that one of them might do the trick. I've been down this path, and it's not very helpful unless you have a specific mechanism in mind.
To describe it another way, I am looking for a planar linkage with a single degree of freedom where two of the links are rotating in opposite directions at exactly (or almost exactly) the same rate. The rotation does not have to be continuous, but the mechanism should work over a sufficiently large range of motion (e.g. 60-90 degrees of rotation). Again, the linkage can have rotary joints and rigid links only.
Special request: Please do not post links to large online collections of mechanisms in the hope that one of them might do the trick. I've been down this path, and it's not very helpful unless you have a specific mechanism in mind.
oh, well, can't you fake that by repeating the links twice with different lengths? i guess i need to try draw a picture
sorry if i've misunderstood (seems a bit obvious, so i suspect you are asking for something more complicated).
posted by andrewcooke at 1:04 PM on May 3, 2016
o
A b b B
Ab o bB
A a a B
A a a B
A a a B
Aa aB
o o
where the a and b links are different lengths (and i haven't drawn the hinges where they meet the output arms).sorry if i've misunderstood (seems a bit obvious, so i suspect you are asking for something more complicated).
posted by andrewcooke at 1:04 PM on May 3, 2016
This function generator linkage apparently has a 60 degree range.
posted by sparklemotion at 1:09 PM on May 3, 2016
posted by sparklemotion at 1:09 PM on May 3, 2016
Actually, what if you took this pantograph and left out the white gears (with the pink and purple bars having fixed pivots where the centers of the gears are)?
posted by sparklemotion at 1:18 PM on May 3, 2016
posted by sparklemotion at 1:18 PM on May 3, 2016
Response by poster: oh, well, can't you fake that by repeating the links twice with different lengths? i guess i need to try draw a picture
Not sure I follow the picture -- which hinges serve as the ground points?
sparklemotion -- in the function generator linkage, the rate of rotation is not constant (it's nonlinear), and the pantograph is unfortunately disqualified due to the slider (I need something that uses rotary joints only).
posted by Behemoth at 1:34 PM on May 3, 2016
Not sure I follow the picture -- which hinges serve as the ground points?
sparklemotion -- in the function generator linkage, the rate of rotation is not constant (it's nonlinear), and the pantograph is unfortunately disqualified due to the slider (I need something that uses rotary joints only).
posted by Behemoth at 1:34 PM on May 3, 2016
For the pantograph, you could constrain the joint that is currently in a slider by adding a Peaucellier-Lipkin linkage to it though, right?
Are you actually restricted to only 6 bars?
posted by sparklemotion at 2:05 PM on May 3, 2016
Are you actually restricted to only 6 bars?
posted by sparklemotion at 2:05 PM on May 3, 2016
Response by poster: I do need this thing to be as simple as possible. The pantograph with the P-L linkage is something like 13 joints and 20 links, which is way too complex. My current approach involves a Sarrus linkage and two slider cranks, which is simpler but still cumbersome, and I keep thinking there must be an easier way.
posted by Behemoth at 2:15 PM on May 3, 2016
posted by Behemoth at 2:15 PM on May 3, 2016
the bottom two circles are the ground points. the a arms and b arms are hinged where they join the two main arms, and at their mid points.
posted by andrewcooke at 2:55 PM on May 3, 2016
posted by andrewcooke at 2:55 PM on May 3, 2016
o
A a a B
A a a B
A a a B
Aa aB
A B
AbbbobbbB
A B
O O
o
A a a B
A a a B
A a o a B
Aa b b aB
A b b B
Ab bB
A B
O O
if that doesn't help, i give up.posted by andrewcooke at 3:04 PM on May 3, 2016
What about this? Again, I think the gears are optional.
posted by sparklemotion at 3:14 PM on May 3, 2016
{kind=link}
posted by sparklemotion at 3:14 PM on May 3, 2016
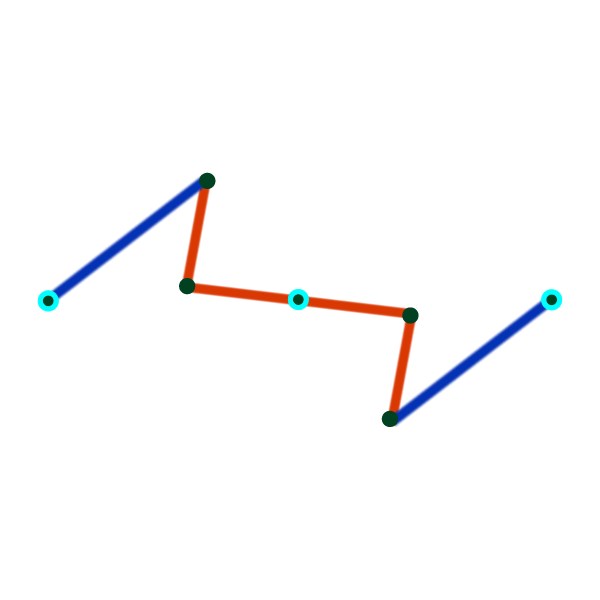
Best answer: Something like this? With the outlined joints being mounted.
posted by lucidium at 4:30 PM on May 3, 2016 [1 favorite]
{kind=link}
posted by lucidium at 4:30 PM on May 3, 2016 [1 favorite]
Response by poster: andrewcooke: So that's actually what I thought you were going for, but I believe that only works if the two hinges in the middle are constrained to move vertically, which requires a slider or additional linkage.
sparklemotion: I think the gears are actually what constrains this five-bar to have a single degree of freedom. Remove the gears, and you need to actuate both of the grounded links independently for this to not flop around.
I think lucidium wins this one, I'm guessing some kind of reverse-motion linkage like that is the simplest possible approach. I'll mess with it a bit more and see if I can what I want out of it. Thanks everyone!
posted by Behemoth at 6:49 PM on May 3, 2016 [1 favorite]
sparklemotion: I think the gears are actually what constrains this five-bar to have a single degree of freedom. Remove the gears, and you need to actuate both of the grounded links independently for this to not flop around.
I think lucidium wins this one, I'm guessing some kind of reverse-motion linkage like that is the simplest possible approach. I'll mess with it a bit more and see if I can what I want out of it. Thanks everyone!
posted by Behemoth at 6:49 PM on May 3, 2016 [1 favorite]
Doesn't an ordinary four bar pantograph (the grey component in the linked video) do this if you fix the centre point and apply your rotary motion to one of the outer arms? You could add a fifth link to constrain that applied motion to be rotary-only if you want.
posted by flabdablet at 6:31 AM on May 4, 2016
posted by flabdablet at 6:31 AM on May 4, 2016
Urk. No it doesn't. Spatial rearrangement fail. As you were.
posted by flabdablet at 6:42 AM on May 4, 2016
posted by flabdablet at 6:42 AM on May 4, 2016
Incidentally, I think lucidium's proposed linkage has the same flaw. Although the motions of the input and output pins are always 180° apart, the reproduced rotary motion ends up being in the same direction as the input.
posted by flabdablet at 6:43 AM on May 4, 2016 [1 favorite]
posted by flabdablet at 6:43 AM on May 4, 2016 [1 favorite]
damn. i actually had to build it to convince myself otherwise (just now). sorry.
posted by andrewcooke at 11:41 AM on May 4, 2016
posted by andrewcooke at 11:41 AM on May 4, 2016
Hmm... Yes, I think flabdablet is right about the inverse rotation linkage.
Maybe modify it by swapping the end connections on one of the blue bars? (That is, the end that was fixed is where the red bar would connect, the end where the red bar was connected would become fixed.) It has the same problem as sparklemotion's function generator linkage, though - I just mocked it up in FreeCAD and it's fairly accurate for +/- 20 degrees, but past that the rates of rotation change pretty dramatically. I'm not sure if tweaking the details might keep it close over a wider range.
posted by sibilatorix at 12:21 PM on May 4, 2016
Maybe modify it by swapping the end connections on one of the blue bars? (That is, the end that was fixed is where the red bar would connect, the end where the red bar was connected would become fixed.) It has the same problem as sparklemotion's function generator linkage, though - I just mocked it up in FreeCAD and it's fairly accurate for +/- 20 degrees, but past that the rates of rotation change pretty dramatically. I'm not sure if tweaking the details might keep it close over a wider range.
posted by sibilatorix at 12:21 PM on May 4, 2016
So I found this neat little mini-CAD package for linkage design, tinkered for a while, and came up with this:
Linkage2 design
MP4 video
Not convinced of the rotational accuracy but it's good enough for art :-)
posted by flabdablet at 11:39 AM on May 5, 2016 [1 favorite]
Linkage2 design
MP4 video
Not convinced of the rotational accuracy but it's good enough for art :-)
posted by flabdablet at 11:39 AM on May 5, 2016 [1 favorite]
Response by poster: It has the same problem as sparklemotion's function generator linkage, though - I just mocked it up in FreeCAD and it's fairly accurate for +/- 20 degrees, but past that the rates of rotation change pretty dramatically.
You sure about that? I mocked it up as well, and it seemed to work exactly. Only the blue links need to have their rates of rotation matched.
Also, your linkage is close but not quite there (e.g. compare links 1 and 3 when they are horizontal vs. when they are vertical). I believe it would work exactly if joints G and F moved in a straight line vs. an arc.
posted by Behemoth at 2:00 PM on May 5, 2016 [1 favorite]
You sure about that? I mocked it up as well, and it seemed to work exactly. Only the blue links need to have their rates of rotation matched.
Also, your linkage is close but not quite there (e.g. compare links 1 and 3 when they are horizontal vs. when they are vertical). I believe it would work exactly if joints G and F moved in a straight line vs. an arc.
posted by Behemoth at 2:00 PM on May 5, 2016 [1 favorite]
Wait, bugger. I was thinking about this in the shower again and flabdablet's totally right, my idea has the blue bars rotating in the same direction. Sorry.
posted by lucidium at 8:29 AM on May 13, 2016
posted by lucidium at 8:29 AM on May 13, 2016
Seems to me that the simplest linkage that could do this properly would be one of Hart's straight-line linkages (either a Hart's Inversor or a Hart's A-Frame at five bars each) with a couple of extra links set symmetrically either side of the straight line:
Seven bars all up (or nine if you count the wheels as bars) which is more than the six you asked for but still not outrageously complicated.
Given real physical links with real physical tolerances, you could probably get away with one of the three-bar straight-line approximators (like a Watt or Chebyshev linkage) instead of the theoretically-exact Hart linkage, saving you two bars.
I would have tested this in Linkage but its simulator doesn't seem to deal with having the straight-line linkages driven by their straight-line connector.
posted by flabdablet at 8:15 AM on May 16, 2016
| <- straight-line motion path enforced using a Hart linkage (not shown)
|
* <- the connector in the Hart linkage that traces the straight line
/|\
/ | \
a / \ b
/ \
/ \
/ \
* * <- connectors on the edges of the contra-rotating wheels
The connector on the Hart linkage, where it and a and b all join, would be driven up and down like a piston as one of the wheels rotates. Because the motion of that common point is constrained to a straight line in which the motions of a and b are mirrored, so are the motions of the wheels connected to them.Seven bars all up (or nine if you count the wheels as bars) which is more than the six you asked for but still not outrageously complicated.
Given real physical links with real physical tolerances, you could probably get away with one of the three-bar straight-line approximators (like a Watt or Chebyshev linkage) instead of the theoretically-exact Hart linkage, saving you two bars.
I would have tested this in Linkage but its simulator doesn't seem to deal with having the straight-line linkages driven by their straight-line connector.
posted by flabdablet at 8:15 AM on May 16, 2016
If you're happy with the Sarrus linkage instead of the Hart inversor, you could just hang two plain conrods and cranks off a corner of that instead of using your slider cranks.
posted by flabdablet at 10:00 AM on May 16, 2016
posted by flabdablet at 10:00 AM on May 16, 2016
This one looks good (the translucent spur gears shown are to illustrate the motion - they're not part of the linkage).
posted by flabdablet at 12:57 PM on May 17, 2016
posted by flabdablet at 12:57 PM on May 17, 2016
This thread is closed to new comments.
posted by andrewcooke at 12:59 PM on May 3, 2016